contents
Computational Intelligence 計算型智慧
本課程將會有三階段程式,將三個算法依序加入程式中,為了要實作這些算法,必須先作出模擬器。
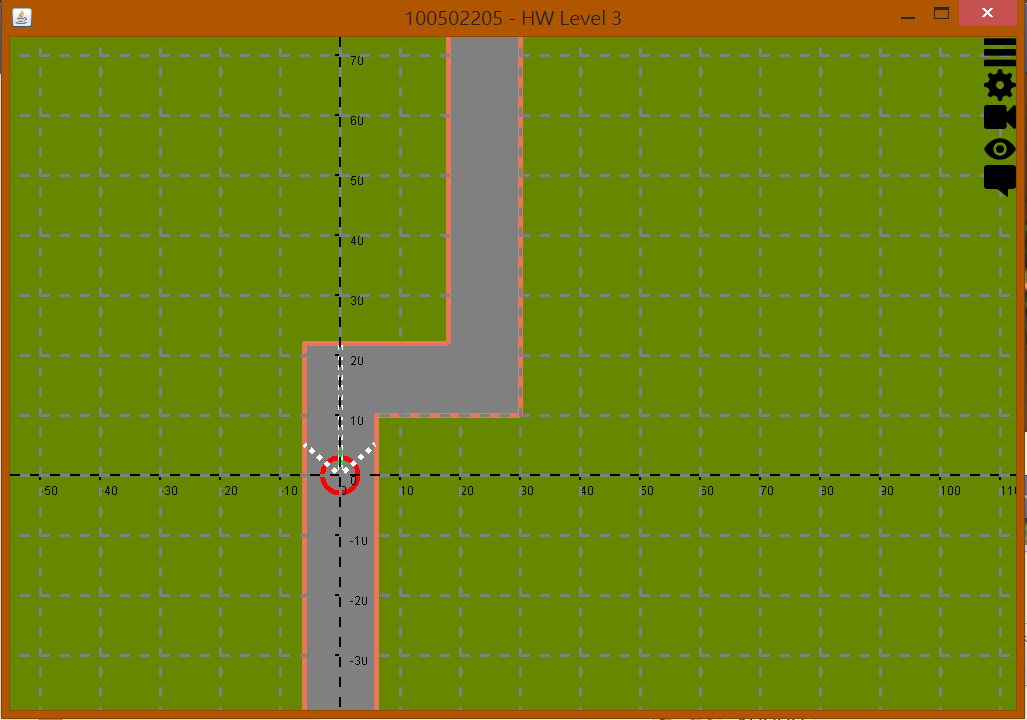
Lv. 0 模擬器
在一個 2D 平面中,以一個圓形當作車子,道路為線段的方式進行描述。為了在隨後的擴充,將地圖內容物分成可行區域多邊形和障礙物多邊形。
- 要支持車子下一秒的擺角,並且按下推動鍵會根據方程式進行移動。
- 可以將車子兩側的感測器進行角度調整,並且可以根據感測器角度進行距離計算。
- 並且在呈現 2D 平面時,附加顯示座標軸的比例。
由於私心,有一些額外產物。
- 完成可以自動置中的設定
- 提供地圖縮放和讀取操作
- 製作地圖產生器 (other project)
- 模擬器的彈木遊戲番外篇 (other project)
- 提供運行欄位的縮起
Lv. 1 模糊系統
車子運行公式
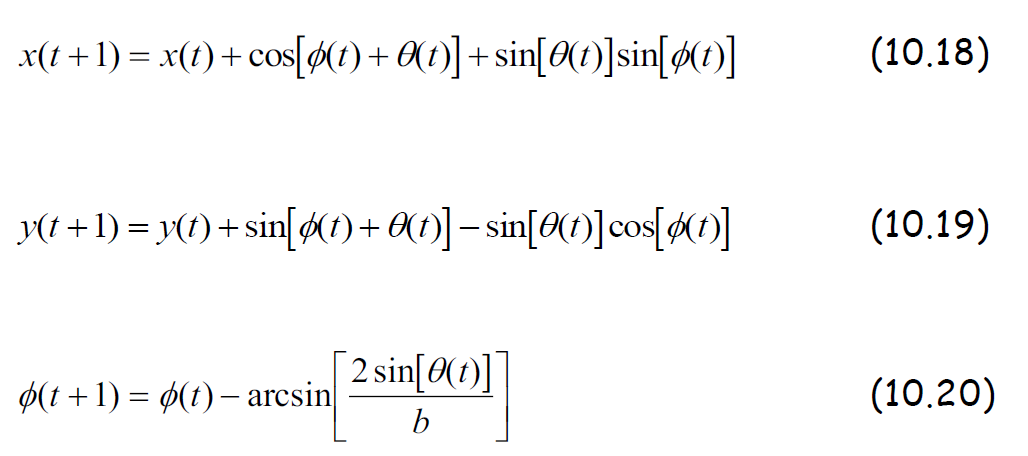
其中 Φ(t) 是模型車與水平軸的角度,b 是模型車的長度,x 與 y 是模型車的座標位置, Θ(t) 是模型車方向盤所打的角度,我們對模擬的輸入輸出變數限制如下:
-40 deg <= Θ(t) <= 40 deg
寫一個程式使用模糊系統、理論模擬車子行徑,並且想辦法最佳化。
- 考慮擴充性,以後車子的運行公式可能會替換,因此建造一個
Engine class。 - 模糊系統的幾個特性拆分成數個 method,並且使用不同的數學計算採用繼承關係。
- 最困難得地方在於計算函數交集,採用離散取點是最後的手段
函數實驗
- 經過實驗,三個感測器分別坐落於前方 (90度)、左右各偏轉 50 度左右的夾角比左右 90 度更好。用以應付多變的轉角彎度,防止模稜兩可的擺動。
- 不管哪裡種去模糊化系統,由於題目限制擺角於 [-40, 40] 度之間,因此很容易在加權平均、質心、離散化而導致邊界擺角的機率甚低,當越多函數則稀釋程度越高。因此函數定義可以超過限制擺角,只需要在去模糊化時,約束至條件內即可。
- 設計函數時,要討論向其中一個方向偏轉,也就是不能設計過於對稱的圖形,否則將會在死胡同裡打轉。
函數設計
d1 為前方感測器,d2 為右方感測器,d3 為左方感測器。
- d1 歸屬函數為

d2, d3 歸屬函數為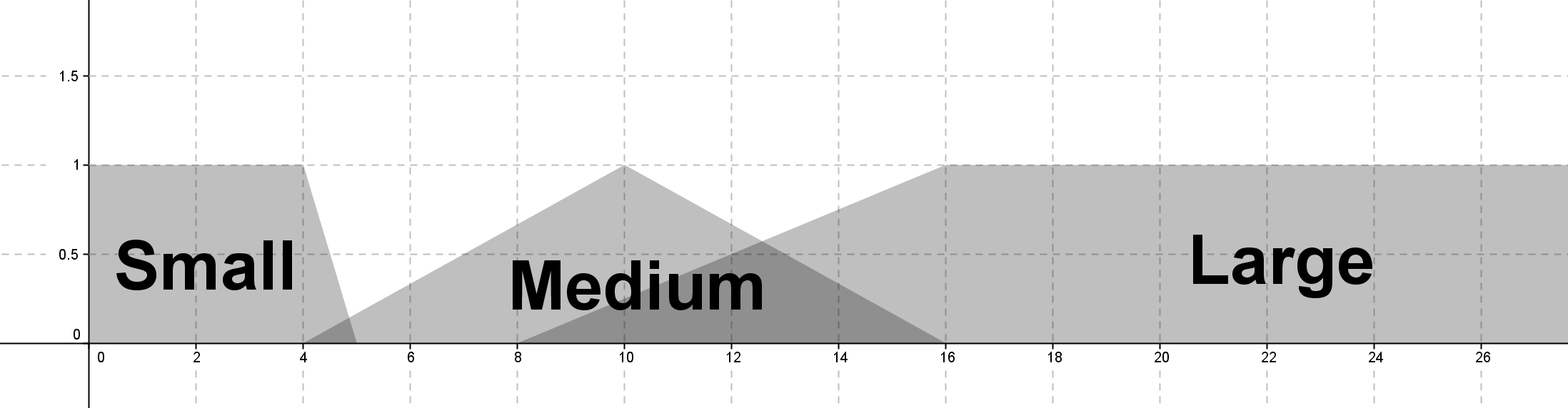
- 函數式加權平均
規則如上述七條,以最簡單的常數關係。測試結果還算不錯。If d3 large, θ = 55 If d2 large, θ = -55 If d2 medium, θ = -40 If d3 medium, θ = 40 If d1 large and d2 small, θ = -30 If d1 large and d3 small, θ = 30 If d1 small, θ = -60if condition, then statement,statement 中的變數不存在於 condition 去做調整,後來發現由於太複雜去討論而一直失敗。 重心法、最大平均法、修正型最大平均法、中心平均法
為了方便計算連續函數,採用離散取點,間隔 0.1 抓取 [-60, 60] 之間的點座標。對於以下四種方法討論於簡單彎道的過程記錄:If d3 large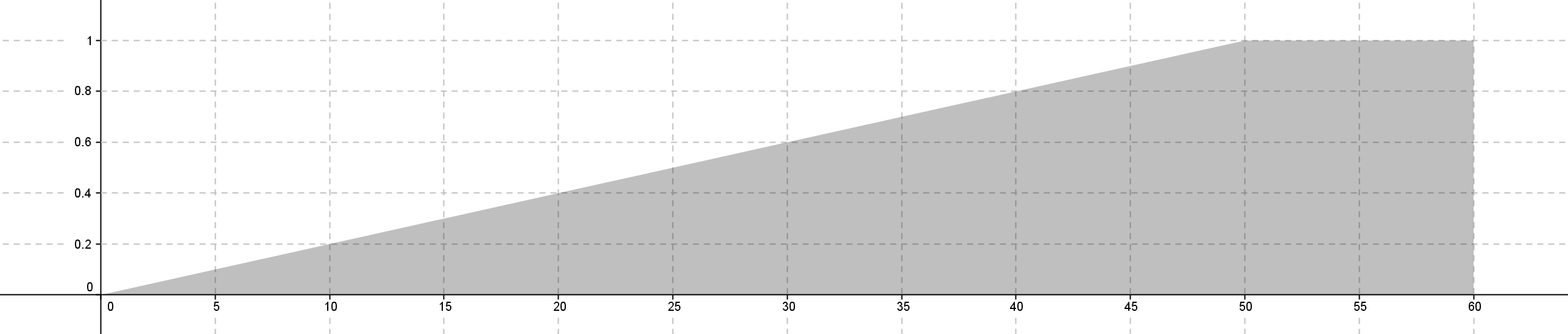
If d2 large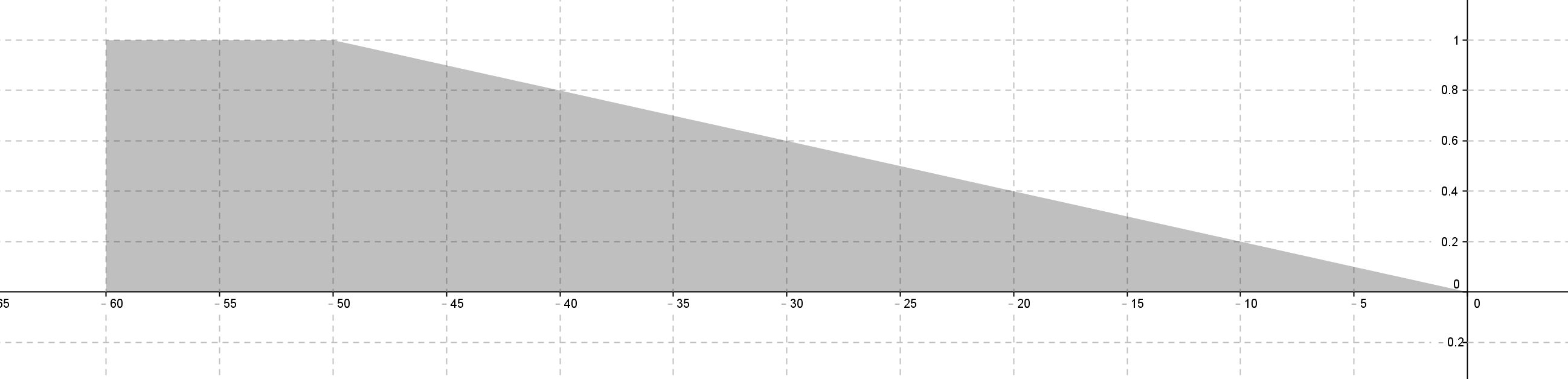
If d2 medium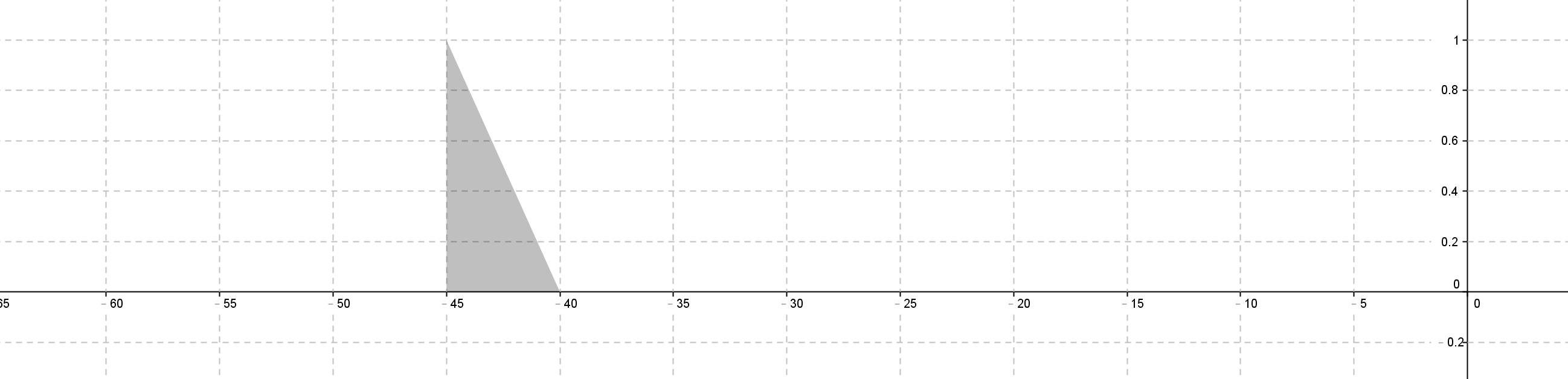
If d3 medium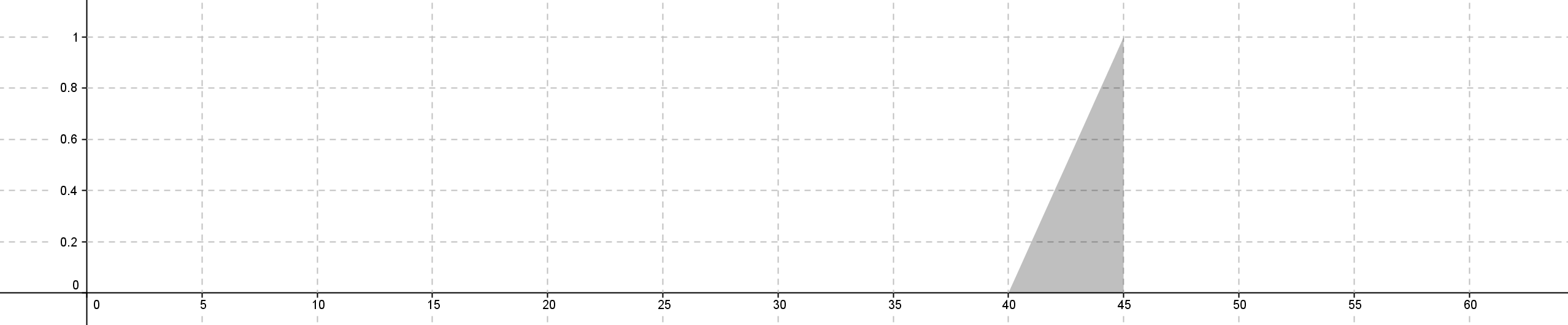
If d1 large and d2 small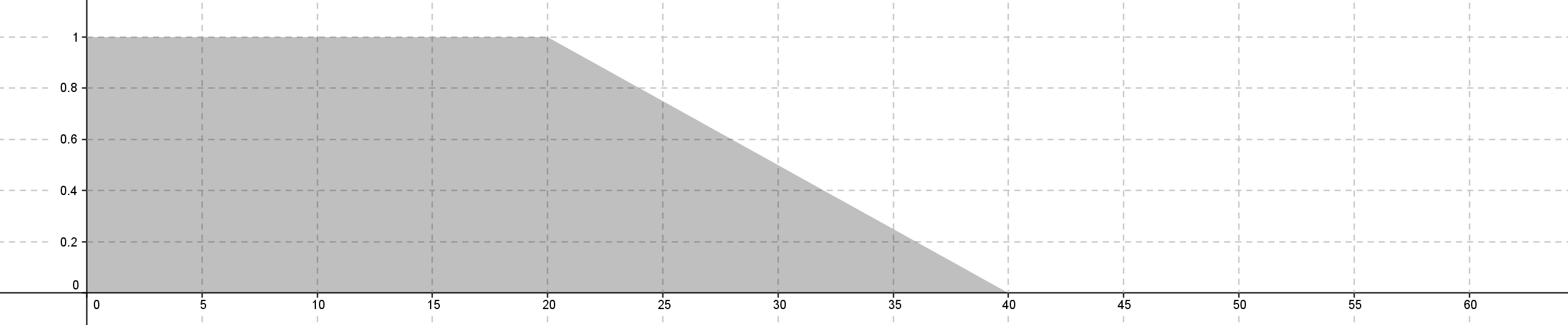
If d1 large and d3 small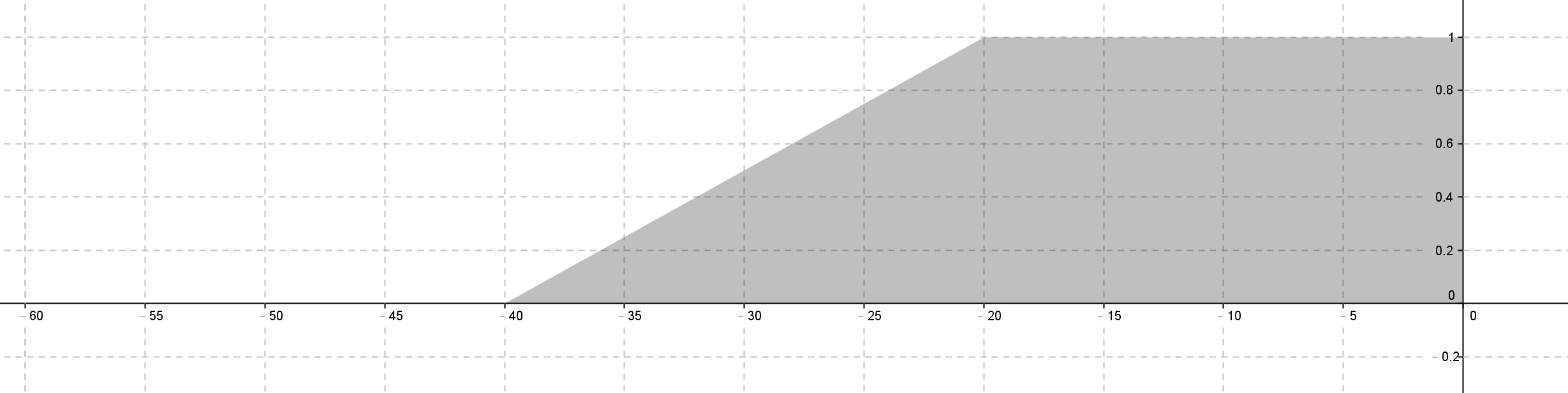
If d1 small, θ = -60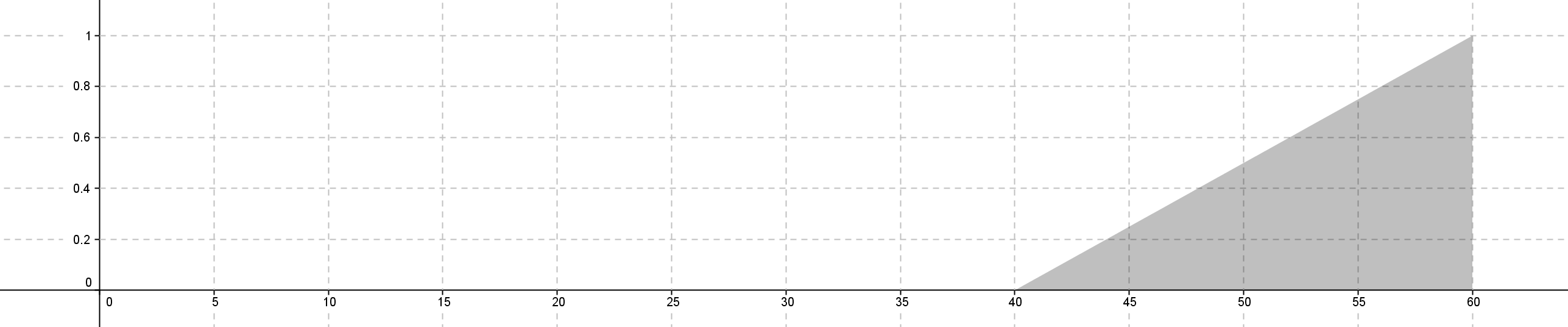
- 重心法
當中表現最為穩健,而且路徑平滑。 - 最大平均法
由於定義的函數較為簡單,而且大多都是以梯形的方式存在,雖然能在機率高的情況下走完全程,路徑中會呈現左右擺盪情況。並且大多都已極值的方式出現。 - 修正型最大平均法
情況會稍微好一些,但是對於並沒有向重心法一樣的圓滑曲線,仍是因為原先的函數設計所惹的問題。
對於某一種方法而去定義相關的函數進行測較好,而在最大平均法的部分,必須使用較具有變化性的曲線,否則很容易在極值狀況下擺動。
- 重心法
Lv 2. GA
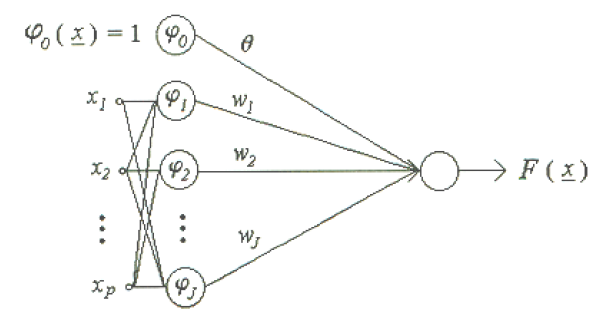
「放射狀基底函數網路 RBF」,基本上,其網路架構如圖1所示,為兩層的網路;假設輸入維度是p ,以及隱藏層類神經元的數目是J ,那麼網路的輸入可以表示成: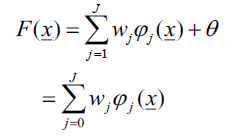
其中選用高斯型基底函數:
其中 x = (x1,x2,…,xp) 、mj = (mj1,mj2,…,mjp) 、|| || 代表向量絕對值
適應函數為:
請用實數型基因演算法,找出wj , mj , σj,在不同的數字J下,最好的基因向量 (例如J為9、輸入x為3維向量,則表示基因向量是1+9+3x9+9=46維度的向量,請注意這裡不是指族群數;又例如J為7、輸入x為3維向量,則表示基因向量是1+7+3x7+7=36維度的向量)下,評估函數E(式1)為越小越好。其中基因向量維度公式為 1+J + pJ+J = (p+2)J+1維向量( ,w1 , w2 ,.., wJ , m11, m12,.., m1p, m21, m22,.., m2p,.., mJ1, mJ2,…, mJp, σ1, σ2, …, σJ)。
參數說明 :
- N 作業1產生的N筆成功到達目的訓練資料(換不同起始點)
- yn 表示訓練資料的方向盤期望輸出值 P.s.如果配合wj值的範圍為0~1之間,在此則必須把yn由-40~+40度正規化到 0~1之間;如果不想正規化 就必須把 wj的值範圍調整到 -40~40之間 範圍為0~1之間
- Wj 範圍為 0~1 (或是-40~40)之間 P.s.此需配合訓練集的yn跟F(n)值範圍,所以皆需正規化到0~1之間;若不正規化,wj的值範圍為 -40~40之間
- mj 範圍跟X範圍一樣,如以提供的範例檔則為 0~30
- σj 範圍為0~10之間;也可以設定更大的範圍做探討。
實作概要 :
把參數編碼成 DNA,使用 GA 算法改變 DNA,然後用之前的模糊系統的結果,讓 RBF 接近之前定義的模糊系統。需要拿模糊系統的一些測資當作訓練資料,收集之後餵給 GA 做訓練。
實驗方法
- 核心代碼,對於每次迭代,著手適應、選擇、交配、突變。
- 細部 “交配” 代碼,採用實數型的分離和聚集兩種情況。
- 細部 “突變” 代碼,採用微量雜訊,唯一不同的地方在於,這個微量雜訊會根據當前數值的比例有關,為了避免大數字對於微量雜訊的干擾不夠強烈。
實驗結果
- 運行結果 J = 3, p = 3
( ,w1 , w2 ,.., wJ , m11, m12,.., m1p, m21, m22,.., m2p,.., mJ1, mJ2,…, mJp, σ1, σ2, …, σJ) = (0.163568 0.851471 1.594151 1.379580 13.092824 0.000505 12.611789 30.000000 0.000368 18.715240 0.000850 2.708967 30.000000 6.307677 7.584529 10.000000) - 訓練數據為 “map2” 走一圈的訓練資訊,約為 500 筆。因為 “map0” (即本次作業給的地圖) 的複雜度不夠以至於無法充分表達原本設計的模糊系統。也就是根據當初模糊系統設計,收集的數據的多樣性和連續性不足。
實驗分析
根據 RBF 的神經元,這裡可以越少越好,在程式中,神經元個數(J) 設置 3 個。運行時採用輪盤式選擇,讓適應能力好的,具有較高的機會繁殖,採用一個隨機變數去挑選。而在基因方面使用實數型基因的形式。
- 運行時,突變機率和突變比例相當重要,由於相同適應能力好的物種量很多,只保留其中一部分即可,因此可以將突變機率0.5 左右,太低則會造成進化速度太慢,太高則容易失去原本適應好的物種,導致整體適應度的震盪。
- 另外設置突變的比例,也就是該段實數值上下調整的比例。
g.getDNA()[i] = g.getDNA()[i] + ratio * Math.random() * g.getDNA()[i];
藉由上述的式子,將 ratio 設置成一個調變比例,來製造爆炸效應的規模。而在運行時,突變效果還能接受。 - 原本運行時,只將 DNA 片段的值任意放置,並且約束在不會超出函數的定義域,在收斂速度上有明顯加速。但為了符合作業需求,將每個參數約束在指定範圍內,在收斂速度慢了一截,在預期結果並沒有很好。
- 在不同地圖收集的預期資訊,會針對不同車子感測器的角度有所差異,因此不能拿不同型的感測數據,訓練出來的 RBF 不能給另外一台車子來使用,除非使用的感測器角度相當接近。
- 對於死路的轉彎,在神經元個數(J) 等於 2 的時候,運行結果較為不佳,但是在本次作業中,並不會有這種數據的出現,也不用考慮這種情況。但是當神經元個數少時,GA 算法的運行速度是相當快的。
Lv. 3 PSO
請利用Particle swarm optimization替換掉 GA 部分。
- AgentNum(粒子數)
- IterationNum(疊代數),
- MaxV(最大速度),
- MaxX(最大值範圍),
- Weights(兩個權重),
- Convergent_Error(停止條件)
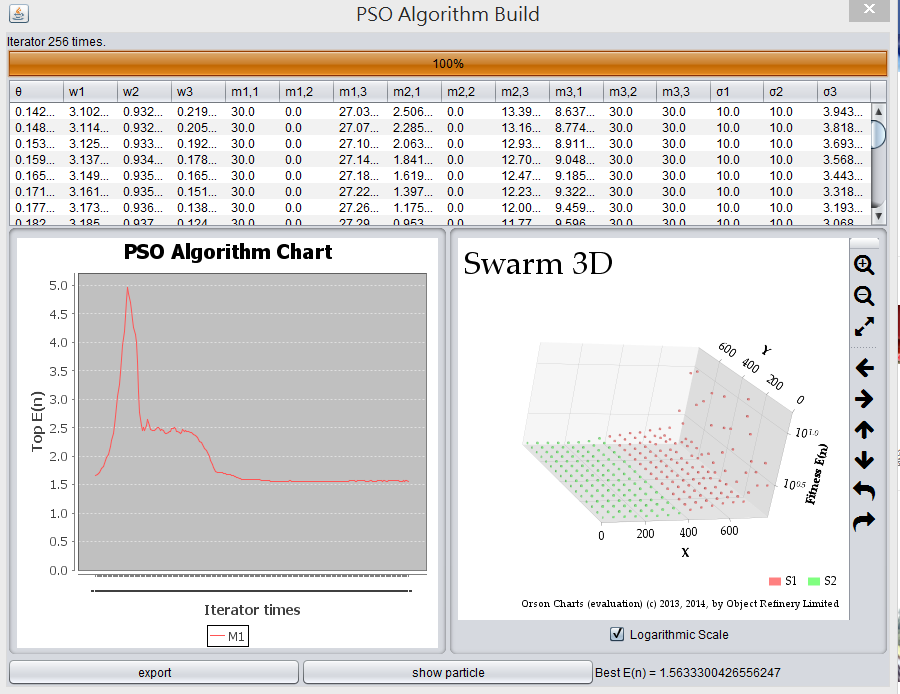
- 並畫出 fitness function 曲線變化 (每一次疊代的最佳fitness值),最後訓練完成的F(x)當作規則 請跑出車子軌跡。
實驗分析
一開始參數為
基本上
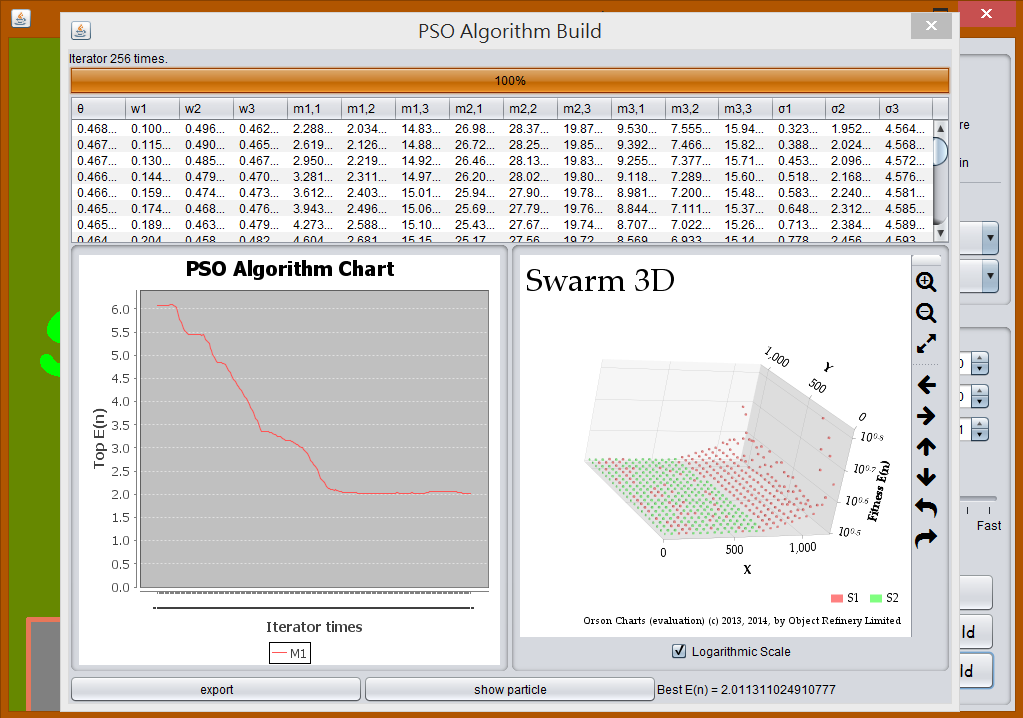
maxXposition沒有用到,調整其他比例可以發現端倪。從圖
PSO 2中可以發現到,PSO 與 GA 最大的不同在於,如果 GA 調用部分突變的情況下,很高的機率會發現適應曲線是嚴格遞減的,但是在 PSO 由於會飛來飛去,有可能會來回震盪。當所有粒子逼近最佳解時,仍會以原本的速度繼續飛行,而原本屬於最佳位置的點也會開始模仿其他粒子飛行,如此一來就會造成震盪。
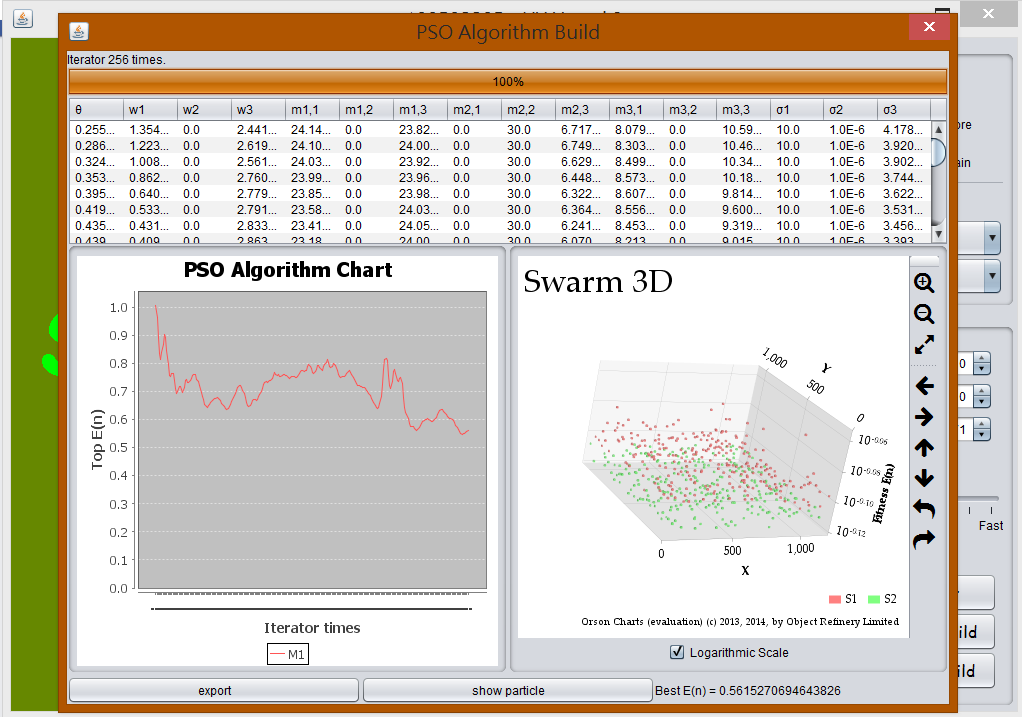
其震盪的高低決定於鄰近模仿的權重,如果鄰近的粒子效果不好,模仿的權重高的時候,會導致整個最佳解有嚴重的偏離。由
PSO 3中可以驗證這個震盪問題。如果對於全局模仿權重調高,很容易造成處於群聚粒子不容易分離,也就是很難在早到其他的區域最佳解,會在很快的時間內進入某一個區域最佳解,從這一點中可以發現 PSO 真的具有快速收斂的性質。
設定
maxVelocity是將整個向量長度 (歐幾里得距離) 壓縮,這將可以控制查找的精密度,如果設定太小會導致收斂速度明顯下降。將maxVelocity = 10時,適應函數看起來會有比較高的進展,由於會將每個參數約束,只要速度不是太小影響就不大。當速度上限增加時,粒子碰到牆的機會也會上升,由於搜索範圍的可能性涵蓋邊界的情況增加,如果最佳解在邊界,在這樣的情況就會更好。
在代碼中,鄰近的定義為最近粒子中排名前 20% 的最佳解。如果採用對於常數長度,這種情況上不容易觀察,也就是說不能直接找到鄰近模仿的規模該定義在何處。
運行結果 J = 3, p = 3
( ,w1 , w2 ,.., wJ , m11, m12,.., m1p, m21, m22,.., m2p,.., mJ1, mJ2,…, mJp, σ1, σ2, …, σJ) = (0.117271 1.270048 0.000000 0.805823 15.845525 0.000000 21.613452 13.509075 0.000000 0.000000 30.000000 0.000000 10.505934 10.000000 10.000000 5.238101)