Description of implementation approach and comments
從一般 BVH 架構中,一般都是用 full binary tree,子節點要不 0 個要不 2 個。若有 $N$ 個 primitive 物件,則表示有 $N$ 個葉節點放置這些 primitive 物件,而有 $N-1$ 個內部節點紀錄 Bounding Box 的部分。在測試交點和遍歷走訪的使用上,最慘有一半是多餘計算和走訪,而另一半屬於加速結構。
在論文 Ray Specialized Contraction on Bounding Volume Hierarchies 中,企圖想要利用 generic tree 取代一般使用 full binary tree 實作,在不更動 BVH 的效能下,減少運行上較沒用的內部節點,用以提升遍歷走訪效能,以及提升內存快取的效率。
降低內部節點步驟如下所示:
- 利用原生方法建立 full binary tree 的 BVH (利用各種分割策略完成)
- 進行坍倒 (flatten),將二元樹不連續的記憶體分布調整成線性分布,加速遍歷走訪的內存快取效率。
- 靜態調整成 generic tree 版本,藉由啟發式收縮 (Contract),利用節點與其子節點的 Bounding Box 表面積比例,評估浪費的走訪節點。
- 動態調整部分,採用隨機取樣,根據取樣 ray,取樣走訪次數,將比較容易打到的節點盡可能收縮到接近根節點。
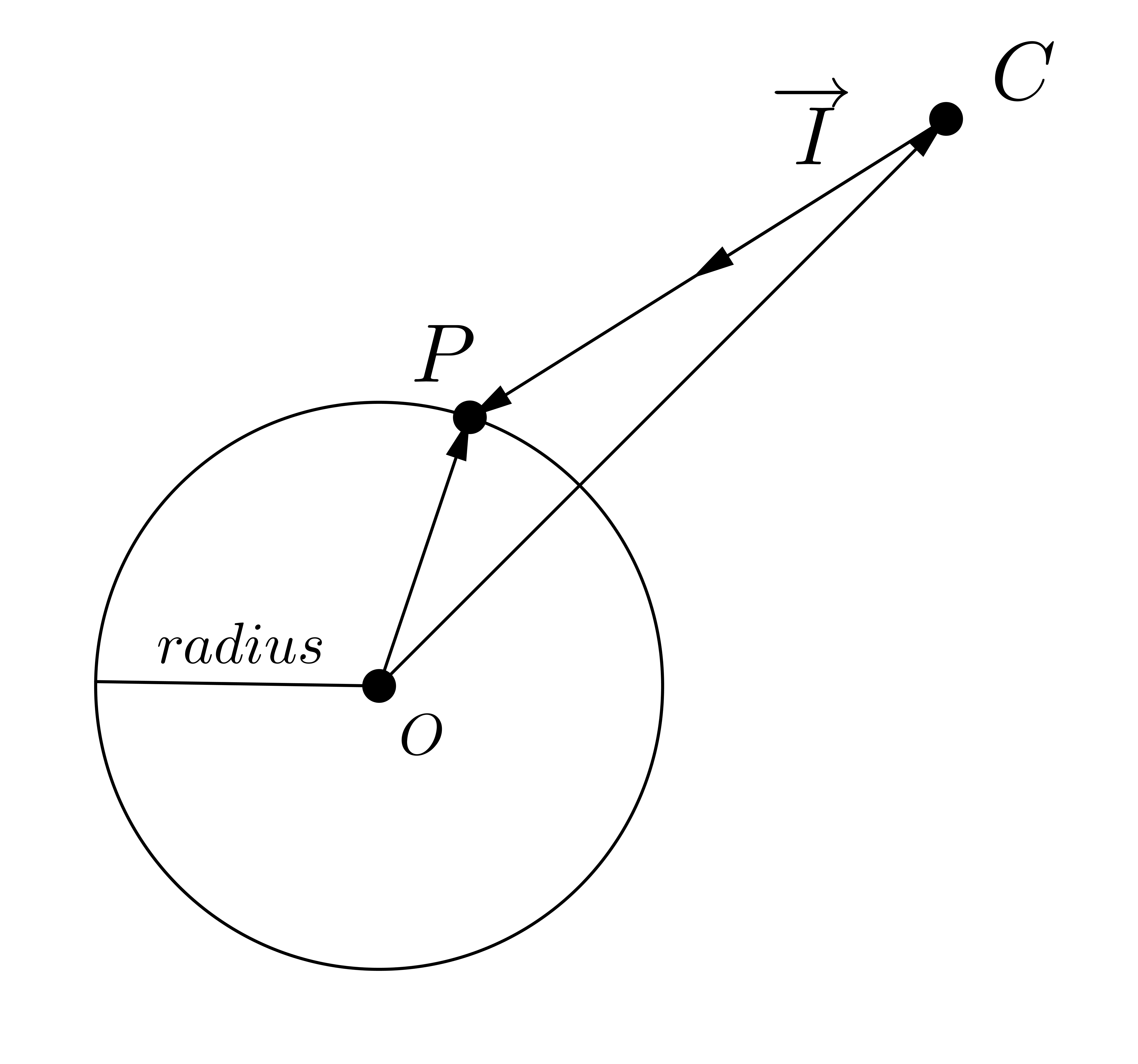
若要收縮節點 $N$,假設 Bounding box 計算交點花費為 $C_B$,穿過節點 $N$ 的 Bounding box 射線機率 $\alpha_N$,得到收縮前後的計算差值 $\delta(N)$,如下所示。
$$\begin{align} \delta(N) &= n_{N.\text{child}} \; C_B - (\alpha_N (1+n_{N.\text{child}}) +(1 - \alpha_N)) \; C_B \\ & = ((1 - \alpha_N) \; n_{N.\text{child}} - 1) \; C_B \end{align}$$目標讓 $\delta(N) < 0$,得到
$\alpha(N) > 1 - \frac{1}{n_{N.\text{child}}}$計算 $\delta(N)$ 顯得要有效率,但又沒辦法全局考量,需要提供一個猜測算法,藉由部分取樣以及步驟 2. 的表面積總和比例進行收縮。
實作部分
從實作中,在步驟 2. 約略可以減少 $25\%$ 的節點,在記憶體方面的影響量沒有太大影響,節點紀錄資訊也增加 (sizeof(struct Node) 相對地大上許多)。
在步驟 3. 中,根據 pbrt-v2 的架構,加速結構能取得的場景資訊並不容易竄改,大部分的類別函數都是 const function(),意即無法變動 object member 的值,但針對指向位址的值可以改變。這類寫法,猜想所有加速結構都是靜態決定,在多核心運行時較不會存在同步 overhead 的影響。
在此,換成另外一種修改方案,在 pbrt-v2/core/scene.h 的 bool Scene::Intersect(...) 函數中加入 aggregate->tick();。利用 aggregate->tick(); 這個函數,大部分呼叫都沒有更動樹狀結構。當呼叫次數 $T$ 達到一定次數時,加速結構會進行大規模的結構調整。
根據 pbrt rendering 的步驟,儘管不斷地測試或者是估計 $T$ 要設定的值,都無法接近全局的取樣評估,其中最大的原因是取樣順序和局部取樣調整,從理論上得知不可能會有比較好的結果。這樣的寫法提供簡便的方案去統計 pbrt 運算時較有可能的 ray 從哪裡射出,不用挖掘所有的不同類型 ray 進行取樣。
最後,修改檔案如下:
修改檔案清單
|
|
core/api.cpp
|
|
core/primitive.h
|
|
core/scene.h
|
|
Generic Tree 設計與走訪測試
在 Full binary tree style - BVH 實作中,利用前序走訪分配節點編號範圍 $[0, 2N-1]$,因此節點編號 $u$ 的左子樹的編號為 $u+1$,只需要紀錄右子樹編號 secondChildOffset,這種寫法在空間和走訪時的快取都有效能改善。在標準程序中也單用迭代方式即可完成,不採用遞迴走訪,減少 push stack 的指令。
在 Generic tree 版本中,基礎節點紀錄架構如下:
|
|
在原生 BVH 求交點寫法中,根據節點的 Split-Axis 以及 Ray 的方向決定先左子樹還是先右子樹走訪,藉以獲得較高的剪枝機率。但全部先左子樹走訪的快取優勢比較高 (因為前序分配節點編號),反之在 Split-Axis 有一半的機率走會走快取優勢不高的情況,在權衡兩者之間。
然而在 Generic Tree 實作上,若要提供 Split-Axis 則需要提供 childOffsetTail 和 siblingOffsetPrev 兩個指針,則多了兩個紀錄欄位,單一節點大小從 sizeof(LinearBVHNode) = 32拓展到 sizeof(LinearBVHContractNode) = 60,記憶體用量整整接近兩倍。從 Contract 算法中,節點個數保證無法減少一半,推論得到在 Contract 後記憶體用量會多一些。
走訪實作上分成遞迴和迭代兩種版本,遞迴在效能上會卡在 push esp, argument 等資訊上,而在迭代版本省了 call function overhead 和空間使用,但增加計算次數。而在我撰寫的版本中,還必須 access 父節點的資訊決定要往 siblingOffsetNext 還是 siblingOffsetprev,因此快取效能從理論上嚴重下滑。
遞迴和迭代走訪寫法如下:
遞迴版本走訪
|
|
迭代版本走訪
|
|
節點大小對走訪效能影響
從實驗數據看來,遞迴版本比迭代版本在越大節點情況效能普遍性地好,預估是在遞迴版本造成的快取效能好上許多。
| sizeof(LinearTreeNode) bytes \ Traversal | Recursive | Loop |
|---|---|---|
| 32 | 6.049s | 5.628s |
| 44 | 6.651s | 6.817s |
| 60 | 7.460s | 6.888s |
| 92 | 9.361s | 9.271s |
| 156 | 16.844s | 16.694s |
| 220 | 25.294s | 27.031s |
| 284 | 28.181s | 30.900s |
| 540 | 28.560s | 33.707s |
實驗結果
由於 tick() 效果並不好,調整參數後與原生的作法差距仍然存在,單靠表面積提供的啟發式收縮,效率比加上動態結果還好。但從實驗結果中得知,實作方面存在一些尚未排除的效能障礙,在多核心部分效能差距就非常明顯,預計是在求交點時同步資料造成的 overhead 時間。
而在減少的節點數量,光是啟發是的表面收縮就減少 $25\%$ 節點量,而在動態收縮處理,儘管已經探訪 $10^7$ 收縮點數量近乎微乎其微 (不到一兩百個節點)。
| sences \ BVH policy | Native | Contract(loop) | Contract(recursive) | Node Reduce |
|---|---|---|---|---|
| sibenik.pbrt | 7.000s | 10.502s | 9.411s | 99576 / 131457 |
| yeahright.pbrt | 12.297s | 14.638s | 14.210s | 288707 / 376317 |
| sponza-fog.pbrt | 16m36.037s | 21m09.960s | 20m12.012s | 91412 / 121155 |
Test sences
Reference paper
Ray Specialized Contraction on Bounding Volume Hierarchies, Yan Gu Yong He Guy E. Blelloch